在3D檢測應(yīng)用中常會遇到一些挑戰(zhàn),常見的有哪些呢?
如何滿足大視野范圍要求場景下進行超高精度測量?
單次掃描無法完整掃描出被測工件、多次掃描的節(jié)拍不能滿足需求怎么辦?
如何獲取管材等圓柱狀被測物的三維點云數(shù)據(jù)?
遇到這些難題不用焦慮,海康機器人3D輪廓傳感器全系列產(chǎn)品攜手VM 3D算法平臺能夠輕松解決,助力智造再升級!
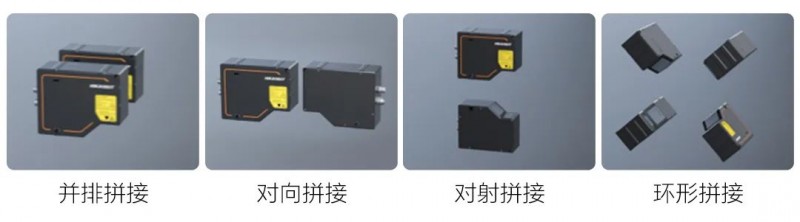
海康機器人3D激光輪廓傳感器通過組網(wǎng)聯(lián)動,實現(xiàn)不同組合方式拼接,呈現(xiàn)不同的應(yīng)用效果,在落地實踐中可以滿足多種需求,廣泛適用于大規(guī)模、高精度、復(fù)雜項目場景。

01
并排拼接
功能:實現(xiàn)大視野、高精度的高精度3D數(shù)據(jù)采集
優(yōu)勢:即能保證單相機精度,又能在保證系統(tǒng)檢測視野的情況下縮短節(jié)拍
應(yīng)用:板材、汽車汽配等行業(yè)3D尺寸測量和缺陷檢測

實際應(yīng)用
項目名稱:某雙相機并排拼接結(jié)構(gòu)件平整度檢測項目
相機型號:MV-DP2120-01H
方案優(yōu)勢:通過兩臺DP2120并排拼接,在保證精度的基礎(chǔ)上增大視野范圍,單次掃描即可測量平整度,提高了檢測節(jié)拍
02
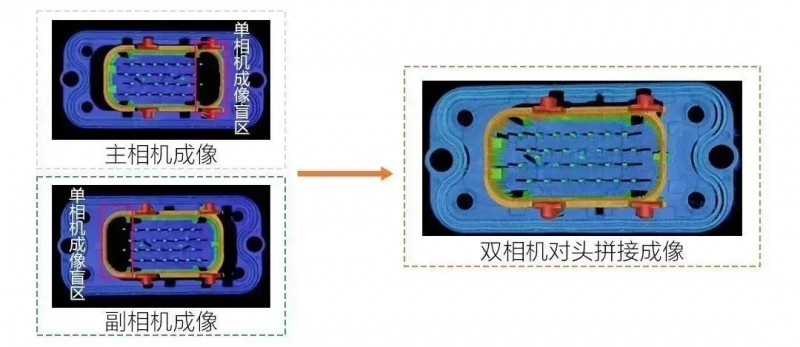
對向拼接
功能:實現(xiàn)帶遮擋物工件的盲區(qū)消除
優(yōu)勢:雙相機通過不同角度拍攝消除盲區(qū)
應(yīng)用:腔形結(jié)構(gòu)件(汽車連接器pin針)位置度及缺陷檢測、PCBA焊點質(zhì)量檢測等

實際應(yīng)用
項目名稱:某雙相機對頭拼接Pin針檢測項目
相機型號:MV-DP3120-01H
方案優(yōu)勢:通過雙相機對頭拼接的方式消除連接器側(cè)壁導(dǎo)致的盲區(qū),單次掃描出圖即可進行pin針位置度檢測
03
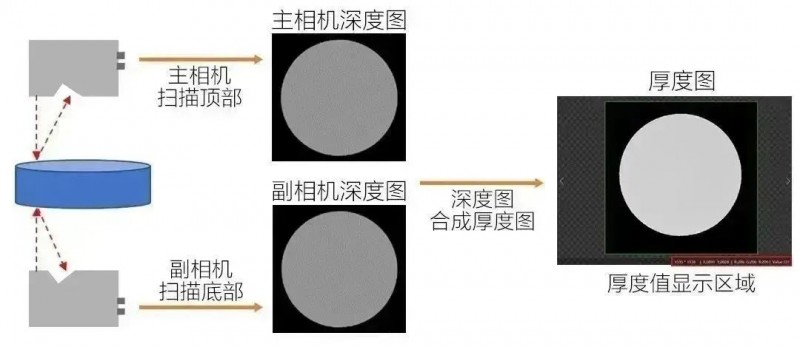
對射拼接
功能:實現(xiàn)工件的厚度測量+表面缺陷檢測
優(yōu)勢:通過上下相機的點云拼接,實現(xiàn)“厚度圖”的生成
應(yīng)用:高精度汽配結(jié)構(gòu)件、3C零部件、白色家電等產(chǎn)品厚度測量和缺陷檢測
實際應(yīng)用
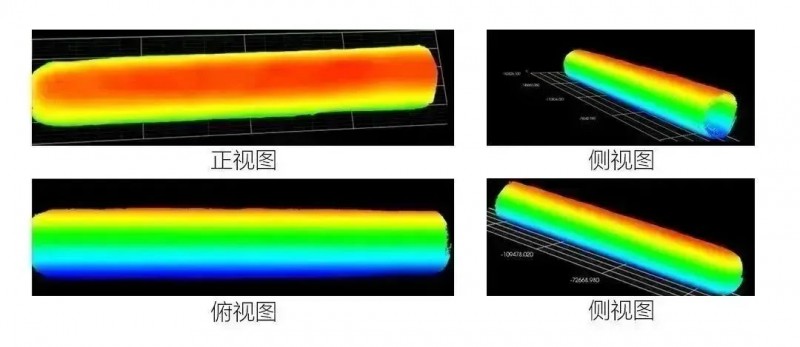
項目名稱:某圓柱體對射拼接測厚項目
相機型號:MV-DP2120-01H
方案優(yōu)勢:通過雙相機對射拼接掃的方式描圓柱體兩個面,輸出圓柱體“厚度”圖像(兩張深度圖差分形成),在“厚度”圖像中可直接顯示圓柱體任意點位的厚度值,以及兩個平面的3D數(shù)據(jù)
04
環(huán)形拼接
功能:實現(xiàn)環(huán)形物體外表面3D點云重建
優(yōu)勢:通過4-6個相機實現(xiàn)柱狀物體外表面的3D點云采集
應(yīng)用:線纜、煙支、管材、香腸、單晶硅棒等柱狀物體的直徑檢測以及缺陷檢測

實際應(yīng)用
項目名稱:某四相機環(huán)形拼接香腸外表檢測項目
相機型號:MV-DP3120-01H
方案優(yōu)勢:通過四臺相機環(huán)形拼接,還原香腸外圈輪廓,實現(xiàn)香腸的直徑測量和表面缺陷檢測
標定流程
海康機器人提供整套硬件+拼接標定軟件,通過流程式操作實現(xiàn)3D激光輪廓傳感器多相機組網(wǎng)應(yīng)用方案部署。

拼接方案集
不同種拼接方式之間可以組合使用,例:對射拼接中,上下兩層相機數(shù)量可適度擴展。
如何滿足大視野范圍要求場景下進行超高精度測量?
單次掃描無法完整掃描出被測工件、多次掃描的節(jié)拍不能滿足需求怎么辦?
如何獲取管材等圓柱狀被測物的三維點云數(shù)據(jù)?
海康機器人3D激光輪廓傳感器通過組網(wǎng)聯(lián)動,實現(xiàn)不同組合方式拼接,呈現(xiàn)不同的應(yīng)用效果,在落地實踐中可以滿足多種需求,廣泛適用于大規(guī)模、高精度、復(fù)雜項目場景。
01
并排拼接
功能:實現(xiàn)大視野、高精度的高精度3D數(shù)據(jù)采集
優(yōu)勢:即能保證單相機精度,又能在保證系統(tǒng)檢測視野的情況下縮短節(jié)拍
應(yīng)用:板材、汽車汽配等行業(yè)3D尺寸測量和缺陷檢測
實際應(yīng)用
項目名稱:某雙相機并排拼接結(jié)構(gòu)件平整度檢測項目
相機型號:MV-DP2120-01H
方案優(yōu)勢:通過兩臺DP2120并排拼接,在保證精度的基礎(chǔ)上增大視野范圍,單次掃描即可測量平整度,提高了檢測節(jié)拍
02
對向拼接
功能:實現(xiàn)帶遮擋物工件的盲區(qū)消除
優(yōu)勢:雙相機通過不同角度拍攝消除盲區(qū)
應(yīng)用:腔形結(jié)構(gòu)件(汽車連接器pin針)位置度及缺陷檢測、PCBA焊點質(zhì)量檢測等
實際應(yīng)用
項目名稱:某雙相機對頭拼接Pin針檢測項目
相機型號:MV-DP3120-01H
方案優(yōu)勢:通過雙相機對頭拼接的方式消除連接器側(cè)壁導(dǎo)致的盲區(qū),單次掃描出圖即可進行pin針位置度檢測
03
對射拼接
功能:實現(xiàn)工件的厚度測量+表面缺陷檢測
優(yōu)勢:通過上下相機的點云拼接,實現(xiàn)“厚度圖”的生成
應(yīng)用:高精度汽配結(jié)構(gòu)件、3C零部件、白色家電等產(chǎn)品厚度測量和缺陷檢測
實際應(yīng)用
項目名稱:某圓柱體對射拼接測厚項目
相機型號:MV-DP2120-01H
方案優(yōu)勢:通過雙相機對射拼接掃的方式描圓柱體兩個面,輸出圓柱體“厚度”圖像(兩張深度圖差分形成),在“厚度”圖像中可直接顯示圓柱體任意點位的厚度值,以及兩個平面的3D數(shù)據(jù)
04
環(huán)形拼接
功能:實現(xiàn)環(huán)形物體外表面3D點云重建
優(yōu)勢:通過4-6個相機實現(xiàn)柱狀物體外表面的3D點云采集
應(yīng)用:線纜、煙支、管材、香腸、單晶硅棒等柱狀物體的直徑檢測以及缺陷檢測
實際應(yīng)用
項目名稱:某四相機環(huán)形拼接香腸外表檢測項目
相機型號:MV-DP3120-01H
方案優(yōu)勢:通過四臺相機環(huán)形拼接,還原香腸外圈輪廓,實現(xiàn)香腸的直徑測量和表面缺陷檢測
標定流程
海康機器人提供整套硬件+拼接標定軟件,通過流程式操作實現(xiàn)3D激光輪廓傳感器多相機組網(wǎng)應(yīng)用方案部署。
拼接方案集
不同種拼接方式之間可以組合使用,例:對射拼接中,上下兩層相機數(shù)量可適度擴展。